|
|
|
We have tested our automatic modeling alogrithms
on a large database of real and synthetic objects.
We have also demonstrated the performance over a wide
range of scales, sensors, and scene types. Finally, we have shown
that automatic modeling produces accurate 3D
models, limited mainly by the quality of the input data.
Here are some example automatically created
models. The objects shown here were scanned with a Minolta Vivid 700
laser scanner, which also records a registered color image of each 3D
view. The left-hand column for each objects shows the color image from
two input views, and the right-hand column shows a rendering of the
automatically constructed 3D model from approximately the same viewpoint.
The VRML models are in VRML 1.0 format and can be viewed with a VRML
viewer such as Cosmo player.
The models have been simplified to 2,000 to 5,000 triangles to keep
the file sizes small. For data sets of about 20 views, the automatic
modeling process takes about 25 minutes: 5 minutes to collect data and
20 minutes to create the model.
|
|
|
photograph of object
|
automatically created model
|
|
|
|
|
|
|
|
|
|
|
photograph of object
|
automatically created model
|
|
|
|
|
|
|
|
Dwarf - 25 views - vrml model
small (680
KB), large
(1.7 MB)
|
|
photograph of object
|
automatically created model
|
|
|
|
|
|
|
|
|
|
|
photograph of object
|
automatically created model
|
|
|
|
|
|
|
|
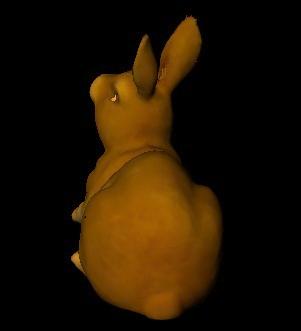
Some artifacts can be seen in the 3D models:
- A small ridge appears under the rabbit's
chin. This is caused by a depth anomoly in the Vivid scanner that
sometimes occurs when objects with horizontal concave ridges are scanned.
Most scanners do not have this problem.
- Some of the models contain holes, which
appear for several reasons. First, it is possible that part of the
object was not seen from any viewpoint. This problem can usually be
solved by taking additional data. Second, laser scanners have difficulty
with very dark surfaces and with very shiny surfaces because the laser
return is not strong enough. This can be seen in the eyes of the four
figures. Finally, some laser scanners have problems near occlusion
boundaries (i.e., discontinuous jumps in the range), causing the range
(and the resulting 3D mesh) to be inaccurate. This problem has not
been studied, and in order to eliminate this bad data, I remove the
boundary vertices of each view in a pre-processing step. The input
range images tend to have numerous small holes, which are enlarged
by this filtering process.
- The texturing of the models is not perfect.
This is due to the low-quality input images and to violations in the
assumptions of the algorithm I use for creating the texture maps (the
algorithm assumes Lambertian surfaces and no shadows).
Next: Large database
test results
|