| Automatic 3D modeling from reality | |
|
Results
| Scale, scene, and sensor invariance
|
|
| Thesis Research |
Robotics Institute
|
| Daniel Huber |
Carnegie Mellon University
|
|
We have also demonstrated automatic modeling for scene scales ranging from a few centimeters to hundreds of meters, for several different 3D sensors, and for various scene types. One of the main advantages of our approach is that the same algorithm works in all cases. There is no need to build or buy separate hardware and software for each scenario. Extreme close up This scenario illustrates how automatic modeling could be used for reducing the labor-intensive task of high-resolution scanning of cultural heritage objects. The setup mimics the data collection parameters of the Digital Michelangelo project. The surface patches are approximately 3 x 3 cm patches of a synthetic object.
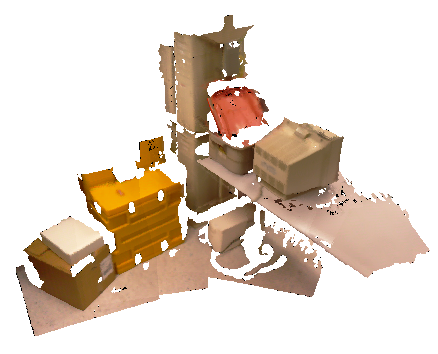
Medium scale At the medium scale, we scanned about 20 different objects and part of our lab using the Minolta Vivid 700 scanner. These scenes range in scale from 10 cm to 3.3 m.
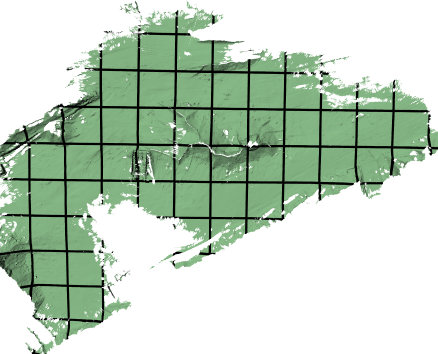
Large scale For large-scale scenes, we used the Z+F scanner to scan building interiors and terrain to create models up to 224 m in size.
Next: Accuracy of the models |
|||||||||||||||||||||||