| Automatic 3D modeling from reality | |
|
Results
| Large database test
|
|
| Thesis Research |
Robotics Institute
|
| Daniel Huber |
Carnegie Mellon University
|
|
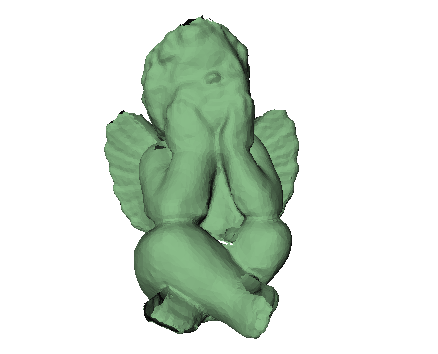
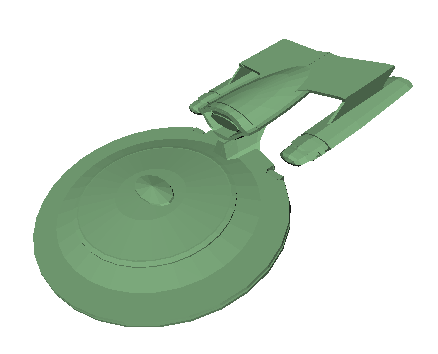
We tested our automatic modeling algorithms on a database of 36 objects (18 real and 18 synthetic with added noise for realism). The data consisted of 15 to 32 input views per object in the form of range images. The data for the real objects was collected using the Minolta Vivid 700 scanner using the handheld modeling technique (the object was held by the user during scanning). The algorithm correctly reconstructed 32 of the objects and incorrectly reconstructed 3. One object was partially correct - the output model consisted of two partial models, when a single one could have been formed from the pair-wise registration results. The algorithm is most likely to fail when the objects to be modeled is very thin and symmetric. For example, the starship enterprise model was thin enough that no view could observe the top and the bottom simultaneously. Because the top and bottom of the saucer section have the same basic shape, the output model incorrectly matches the top and bottom surfaces of the saucer, resulting in half the views being flipped upside down. Examples of real objects
Examples of synthetic objects
|
||||||||||||||||||||||||||||