(第八頁)社群生活和矽晶片……
|
(第十三頁)先是上升,再來下降:人類所擁有不斷增長的知識和財富,為每個人帶來了更多的選擇……
|
(第十四頁)(解說如前圖)
|

(第二十一頁)史丹福人工智慧實驗室的結晶 — 『推車』機器人:『推車』既是機器人,也是馬路上的危險份子……
|

(第二十三頁)格雷·華特博士 (W. Grey Walter) 在一九五○年調整他所創造尋光電子龜的情形:當『愛爾喜 (Elsie)』號完成組裝後……。
|

(第二十五頁)攝於一九六四年的兩台早期『霍普金斯之獸』 (Hopkins Beast) 機器人正在使用牆壁上的插座充電……
|

(第三十七頁)攝於一九七○年,正在對著周遭積木進行思考的『搖晃小子』機器人……
|

(第四十八頁)這是由一臺於一九九○年設計的系統對困難度頗高的走道所產生的二度空間證據格子圖……
|

(第五十三頁)一九七九和一九九七年的比較 — 由立體視覺影像所推得的三度空間地圖……
|

(第五十九頁)由卡內基美倫大學所研發,具有自我駕駛能力的各代導航實驗室號載具……
|

(第八十一頁)MIPS 和百萬位元組:在這圖裡每一樣東西都根據了……
|
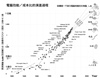
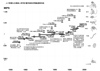
(第八十六頁)運算能量呈現出指數式成長的趨勢:這張圖所顯示的,是由一九○○年到今天用一千元美金所能買到電腦能夠達到的運算速度……
|
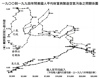
(第九十八頁)大凍結:在一九六○到一九九○年期間,用在人工智慧研究上的電腦價格降低了,數量增多了,但是相關研究所得到的經費卻也持續地遭到緊縮……
|

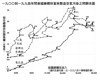
(第一百頁)由痛苦到喜樂:在四十年的光陰之間,電腦的棋力由最低的谷底攀爬到了人類棋力的最高峰……
|

(第一百二十八頁)
|

(第一百二十九頁)
|

(第一百三十六頁)吸塵機器人:圖中所示的概念設計,是在不久的將來即將實現的家用自動吸塵機器人 — 使用者只需要下達極少的指令,機器人便能夠順利地進行運作……
|

(第一百四十三頁)P2機器人 — 一台剛萌芽的萬用機器人雛形:這不是一個身穿太空裝的人,而是一具由日本本田機械公司 (Honda Motors Corp.) 旗下三十位工程師所組成的研究團隊……
|

(第一百五十三頁)萬用機器人的構想圖:這種機器人配備有全向式的輪台,讓它能夠在平坦的地面上自由地移動……
|

(第一百五十七頁)遞送物品的萬用機器人:這張三度空間的機器人構想圖,是由傑西·伊蘇德斯 (Jesse Easudes) 利用 ProEngineer 程式所繪製的。
|

(第一百六十九頁)組裝物品的萬用機器人(解說與前圖相同)
|

(第一百八十頁)在廚房裡忙碌的萬用機器人(解說與前圖相同)
|

(第二百二十頁)籃狀海星 — 先進機器人身體設計的藍圖:這張圖是由理查·艾利斯 (Richard Ellis) 所著《深不可測的大西洋 (Deep Atlantic)》一書中……
|

(第二百二十一頁)變戲法的機器人 (側面圖):這是一個正要開始進行多樣工作的樹叢機器人 — 也只有樹叢機器人可以達到這樣驚人的多工效率……
|

(第二百二十二頁)變戲法的機器人 (仰視圖)
|

(第二百二十八頁)進行同步軌道運行的天橋:將一條兩端較中間細的纜索一端固定在赤道上,另一端則以設置在距地表十五萬公里高空中的配重拉扯繃緊……
|
(第二百三十一頁)一條在軌道進行非同步運行的『天鉤 (skyhook)』:圖片中顯示的是一條兩端細中間粗、繞地球進行軌道運轉、並同時進行自旋的纜索。纜索的兩端會定期地旋轉進入大氣層……
|
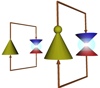
(第二百六十五頁)簡單的時間迴路:這張圖顯示了有關時光旅行的一些問題。圖中的電路是由放大器(角錐體)和反相器(頂了一個小圓球的角錐體),配合了負向的時間延遲裝置(雙角錐體)所組成……
|
(第二百六十九頁)找尋『定點 (fixed point)』的電路:若是將一個逼近解丟進一個用來計算『下一個更精確逼近值』的電路,它將會求得更為完美的解答……
|

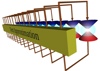
(第二百七十二頁)『NP』求解器:圖中的電路將會測試各種不同的旅行推銷員問題 (traveling salesman problem) 解答……
|

(第二百七十五頁)西洋棋求解器:圖中的電路結合了量子電腦和時光旅行電腦所使用的不同技巧,能夠在所有可能的西洋棋局棋步中搜尋出最佳的下一步棋……
|
